Sistema automático de estabilización para un vehículo submarino operado remotamente utilizando visión por computadora
| dc.contributor.advisor | Kato Ishizawa, Gustavo | |
| dc.contributor.author | Hidalgo Herencia, Franco | es_ES |
| dc.date.accessioned | 2013-02-20T17:16:51Z | es_ES |
| dc.date.available | 2013-02-20T17:16:51Z | es_ES |
| dc.date.created | 2012 | es_ES |
| dc.date.issued | 2013-02-20 | es_ES |
| dc.identifier.uri | http://hdl.handle.net/20.500.12404/1752 | |
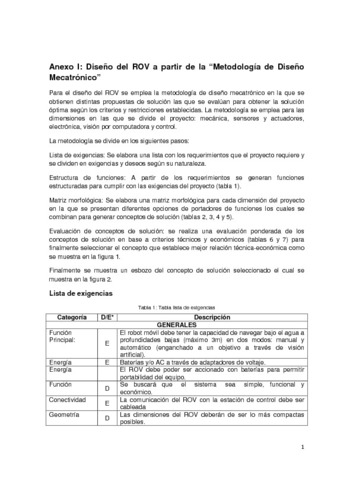
| dc.description.abstract | Se presenta el diseño e implementación de un vehículo submarino operado remotamente con un sistema de estabilización automático. El vehículo submarino o ROV, por sus siglas en inglés (Remotly Operated Vehicle), tiene tres grados de libertad que le permiten realizar el movimiento arriba-abajo, adelante-atrás y el giro izquierda-derecha. El sistema de estabilización permite que el ROV se mantenga enfocado a un objetivo predeterminado y pueda seguirlo gracias a técnicas de visión por computadora que determinan la distancia y orientación del objetivo y, a un controlador de lógica difusa que gobierna un sistema de propulsión a chorro direccionado por un sistema de transmisión. | es_ES |
| dc.description.uri | Tesis | es_ES |
| dc.language.iso | spa | es_ES |
| dc.publisher | Pontificia Universidad Católica del Perú | es_ES |
| dc.rights | info:eu-repo/semantics/openAccess | es_ES |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-nd/2.5/pe/ | * |
| dc.subject | Control automático | es_ES |
| dc.subject | Visión por computadoras | es_ES |
| dc.subject | Lógica difusa | es_ES |
| dc.subject | Submarinos | es_ES |
| dc.title | Sistema automático de estabilización para un vehículo submarino operado remotamente utilizando visión por computadora | es_ES |
| dc.type | info:eu-repo/semantics/masterThesis | es_ES |
| thesis.degree.name | Maestro en Ingeniería Mecatrónica | es_ES |
| thesis.degree.level | Maestría | es_ES |
| thesis.degree.grantor | Pontificia Universidad Católica del Perú. Escuela de Posgrado | es_ES |
| thesis.degree.discipline | Ingeniería Mecatrónica | es_ES |
| renati.discipline | 713167 | es_ES |
| renati.level | https://purl.org/pe-repo/renati/level#maestro | es_ES |
| renati.type | http://purl.org/pe-repo/renati/type#tesis | es_ES |
| dc.publisher.country | PE | es_ES |
| dc.subject.ocde | https://purl.org/pe-repo/ocde/ford#2.00.00 | es_ES |
Files in this item

This item appears in the following Collection(s)

Except where otherwise noted, this item's license is described as info:eu-repo/semantics/openAccess



